| Поиск |
| Сообщения за день |
| 24.10.2014, 22:04 | ||||
|
||||

|
Делаем простейшего робота
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии. Принцип поведения робота основывается на "фоторецепции" и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция — одно из основных фотобиологических явлений, в котором свет выступает как источник информации. В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом — ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости. В устройстве робота кроме микросхемы драйвера моторов L293D будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор. В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой. На рисунке приведены монтажная и принципиальная схемы робота, и если вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с "землей" (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с "землей". Иногда рядом с такой черточкой пишут три буквы "GND", что означает "землю" (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания. Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал, мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если небольшим — чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя. 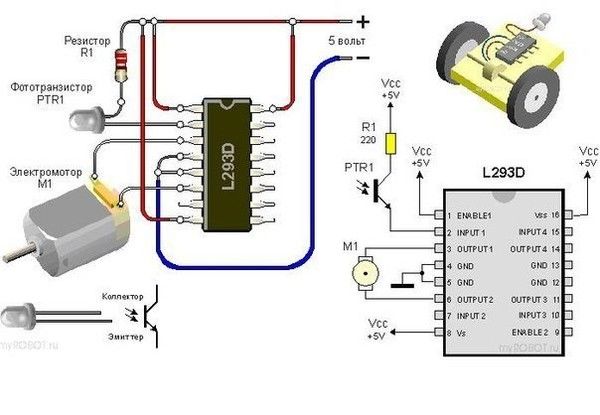
|
|||

|
Solium был основан 1 февраля 2006 года, как объединяющий просветительский проект на стыке областей. Он помогает заглянуть в "сверхъестественную" часть нашей жизни, чтобы лучше понять самих себя и руководствуясь этим знанием, образовать гармоничное и светлое будущее в едином Содужестве заинтересованных людей. Присоединяйтесь?
После регистрации Вы сможете создавать свои темы и отвечать на сообщения.
Регистрация!




